Sweep Creation by Guides |
  
|
Sweep Creation by Guides |
|
Creating a body by guides requires a contour, a trajectory and at least one additional guide. The first additional guide is used for calculating the first auxiliary vector for each intermediate section. The intermediate points for defining auxiliary vectors on the trajectory and additional guides are always calculated "by parameter". This vector is simultaneously used for scaling an intermediate section and for orienting it (by calculating the direction of one of the axes of the intermediate section coordinate system). The direction of the second axis of the intermediate section coordinate system can be calculated automatically (as the cross product of the calculated auxiliary vector and the tangent to the trajectory at the origin point of the intermediate section coordinate system).
To define an intermediate section orientation other then offered by the system, one could use a second additional guide. That will help the system calculate the second auxiliary vector for each intermediate section. The two auxiliary vectors will define the X-Y plane of the intermediate section coordinate system. The Y-axis of the intermediate section coordinate system will be oriented in the direction closest to that of the second auxiliary vector.
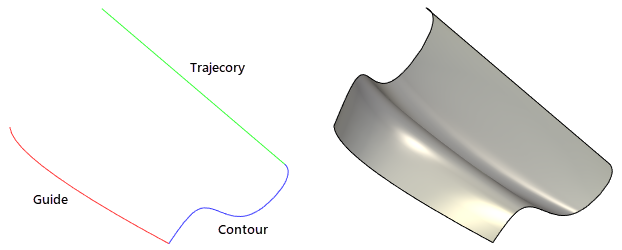
The approach to solid body creation by using an additional guide or guides serves certain specific goals, such as closing a gap between two curves by a surface obtained by sweeping a specified contour. Creating this kind of bodies assumes that the original contour will rest at one of its ends on the start point of the trajectory path, and at the other end - on the start point of the additional guide. In theory, some kind of a result can be obtained by using various orientations of the original contour, however, the result will be rather hard to predict.
If, for example, the original wire contour rests at its ends on the start points of the trajectory and an additional guide, the resulting surface connecting the trajectory and the additional guide will follow the shape of the original contour.
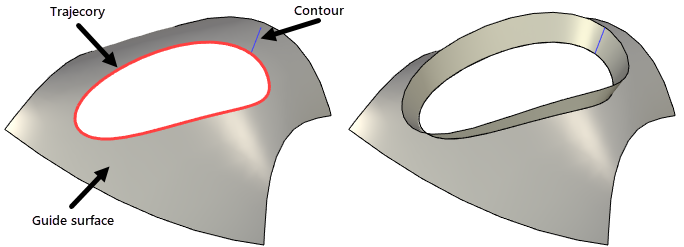
Faces can be used instead of the first and second additional guides. Orientation of the intermediate sections will be defined by auxiliary vectors calculated as perpendiculars to surfaces at points nearest to trajectory points. In practice surfaces adjacent to trajectory are mostly used. The use of surfaces for defining contour twist is applicable when the first two methods of contour orientation (Perpendicular to the trajectory and Parallel to the original profile) cannot be employed. The following example demonstrates sweep operation when the contour-segment is oriented perpendicular to the auxiliary surface in every point of the trajectory.
Sweep definition by guides
The difference of the By guides approach from Perpendicular to path and Parallel to source contour is that you select a single guide for defining both twisting and scaling. In this way, you can't select the method of vector calculation or the scaling point. Instead, you define the correction of the original profile orientation by one or three points. The correction makes the system work in the same way as under the option Perpendicular to path.