Mars rover
Project Description
The model is created in the scope of first year students Project practice in the National Research Nuclear University MEPhI.
The target was to design an autonomous Mars rover capable of overcoming obstacles both in radio-controlled mode.
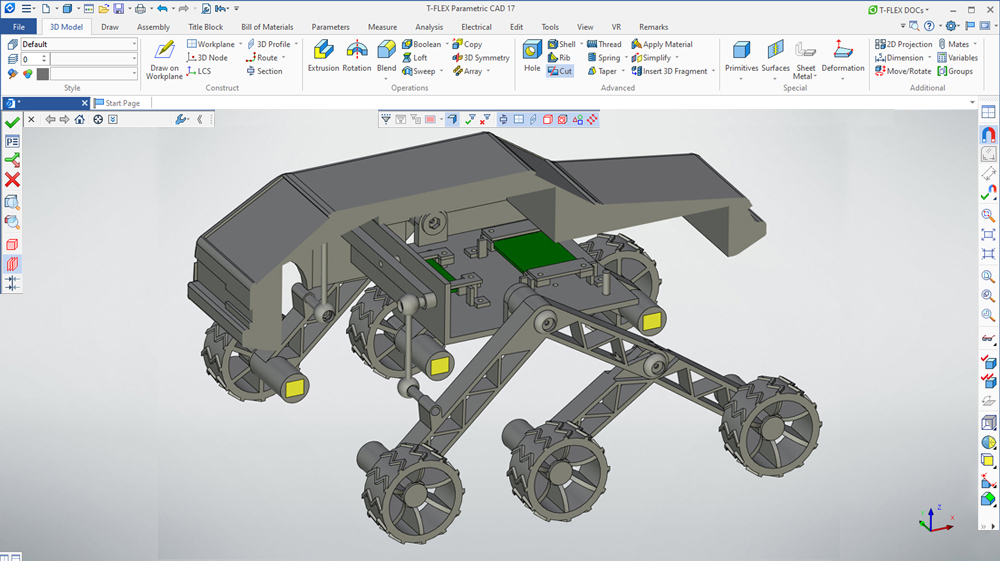
The rover is fully designed in the T-FLEX CAD. Parts of the rover (platform, wheels, suspension etc.) are supposed to be 3D printed using the FDM technology.
Main part of the rover is its suspension which is based on the real Mars rover design. The platform is fixed horizontally using the system of hinges.
All technological holes and electronic slots necessary for assembling the rover are modelled.
The unique feature of this rover is its original design based on a russian VAZ 2109 car. The body of the rover is quickly detachable for easy access to electronic components.